Assembled Assemblers
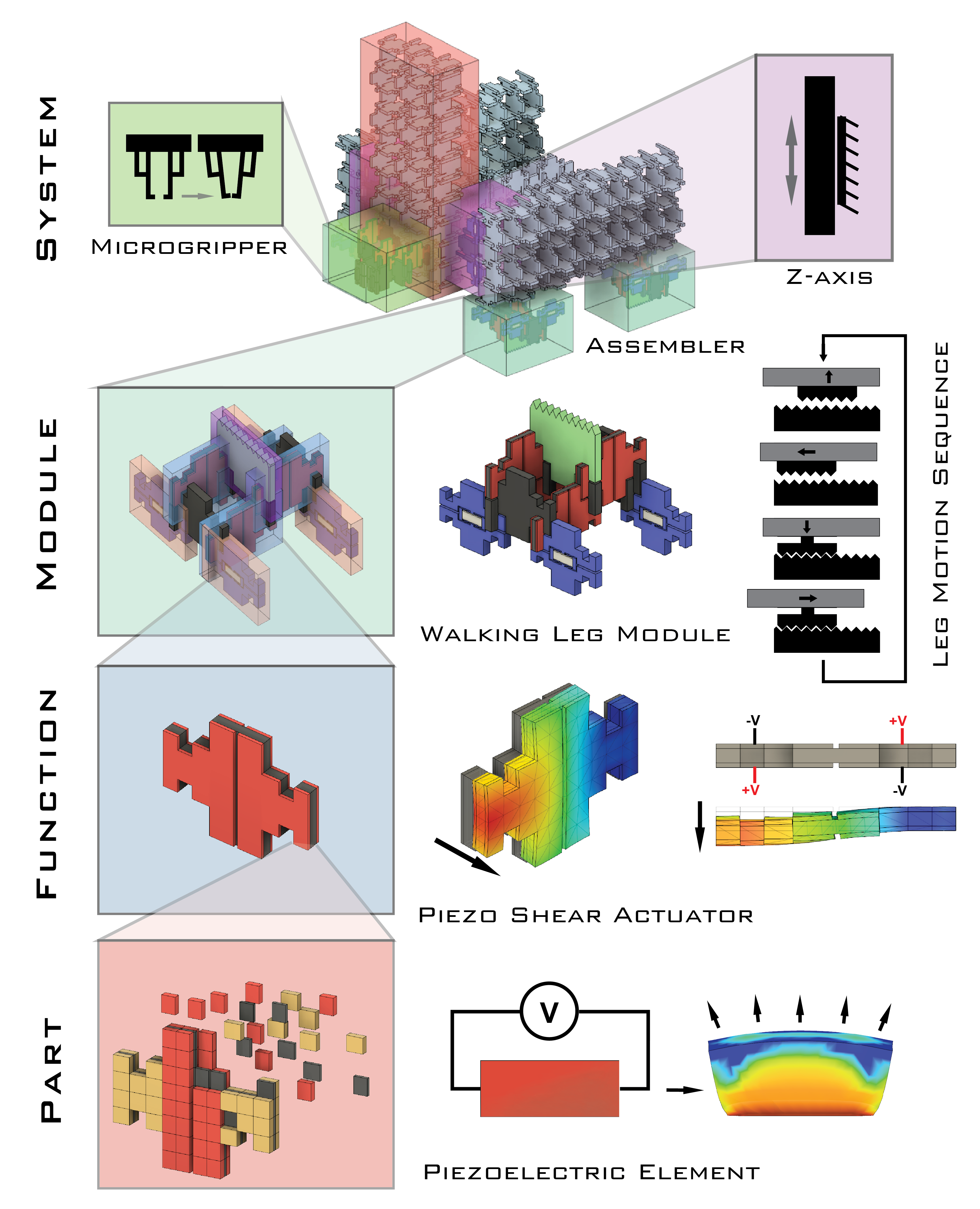
The hierarchichal decomposition of the assembled systems is analogous of the primary, secondary, tertiary, and quaternary structure of proteins:
Assemblers place a part at a time:
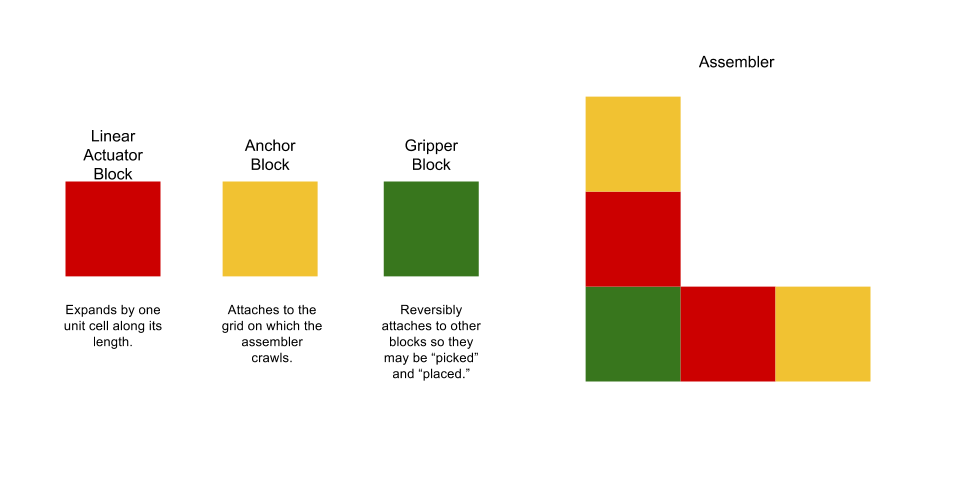
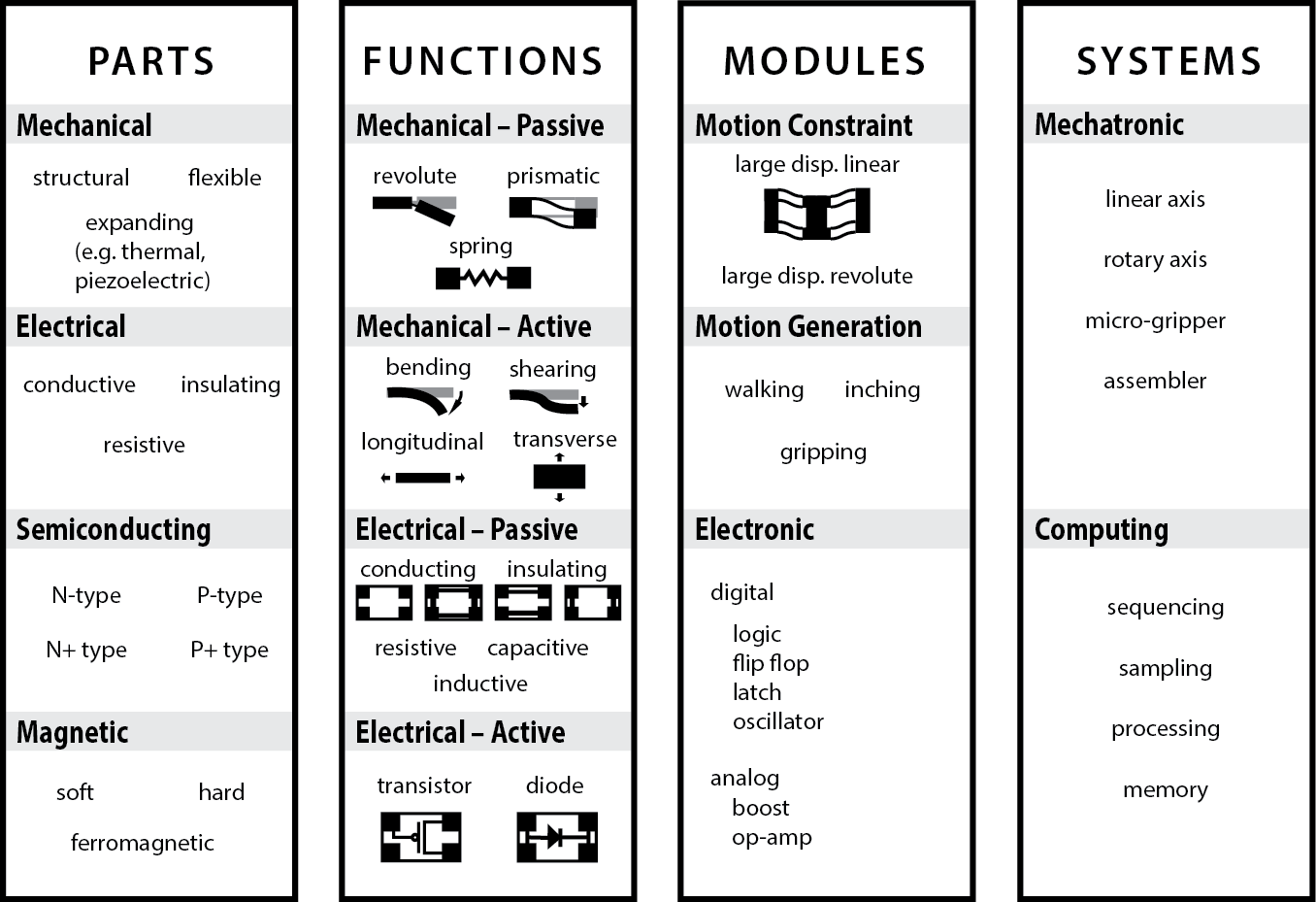
A taxonomy of brick-types at each level of hierarchy:
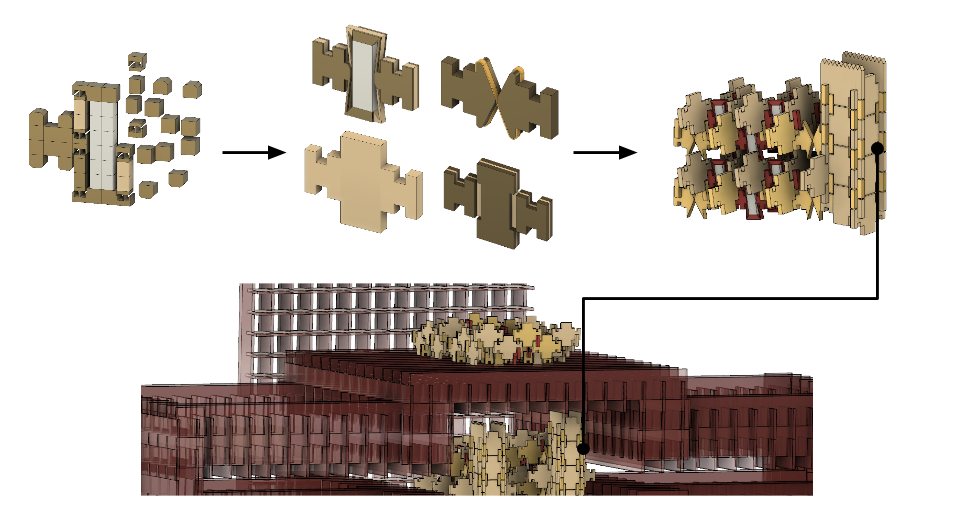
From raw material building blocks to assembled assemblers:
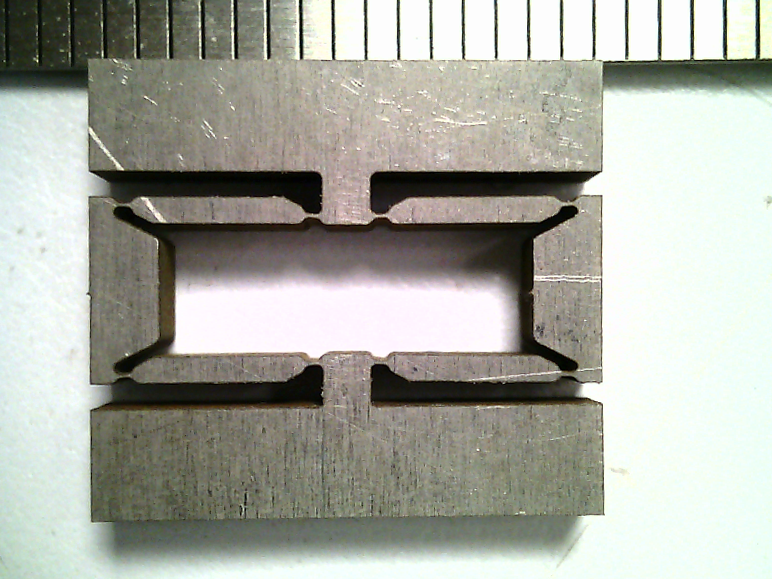
We propose to first focus on the development of functional bricks from which mechanisms and robotic modules can be assembled. These bricks include functions such as hinge joints, actuation, conductivity, and structure.
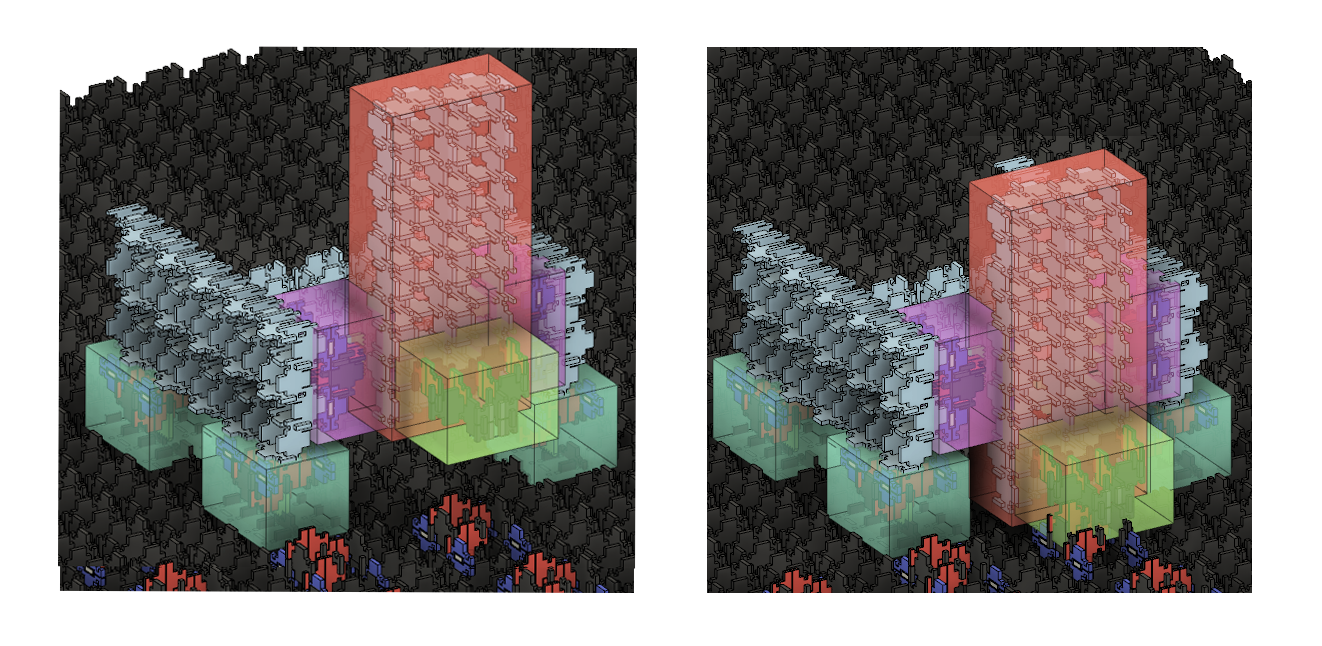
There is a natural hierarchy enforced as blocks are assembled into higher-level parts, which then become blocks to assembler even higher-level functionality. Here, a piezoelectric block is a part of a large-displacement linear actuator mechanism, which is, in turn, part of a walking leg mechanism, which, in turn, is part of an assembler stage.

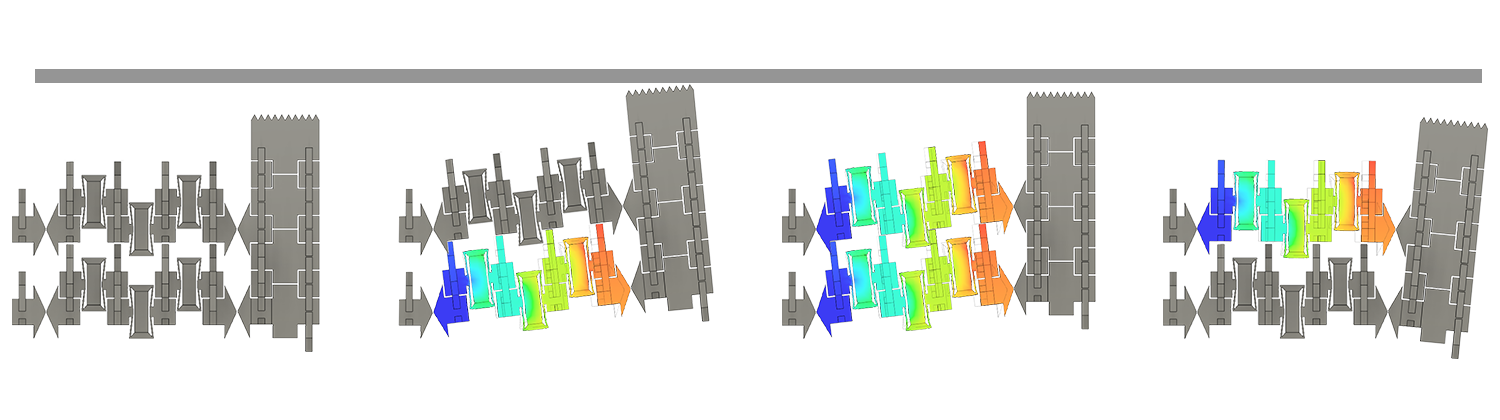
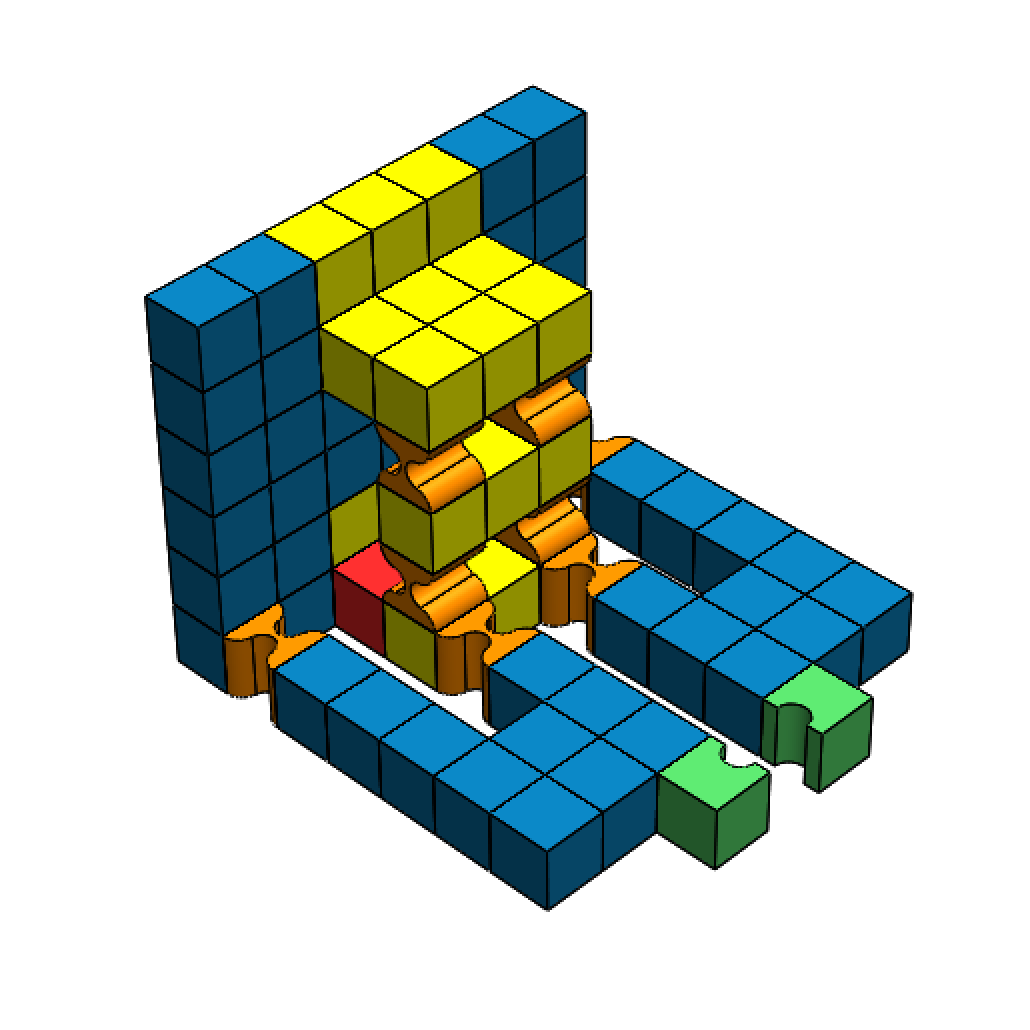
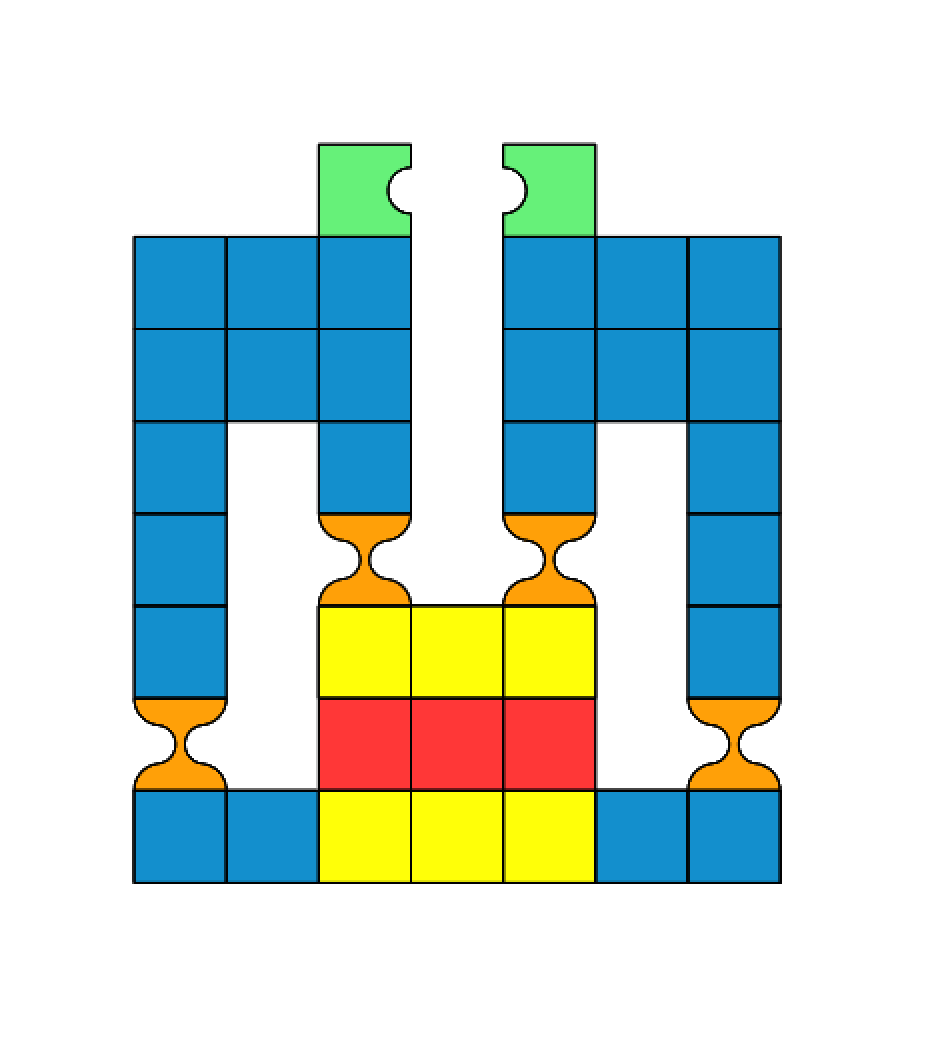
Through the arangement of the functional bricks, more complex mechanisms can be assembled. For example, illustrated here is a walking motor which moves the stage above it through the sequential firing a series of piezo actuator bricks.
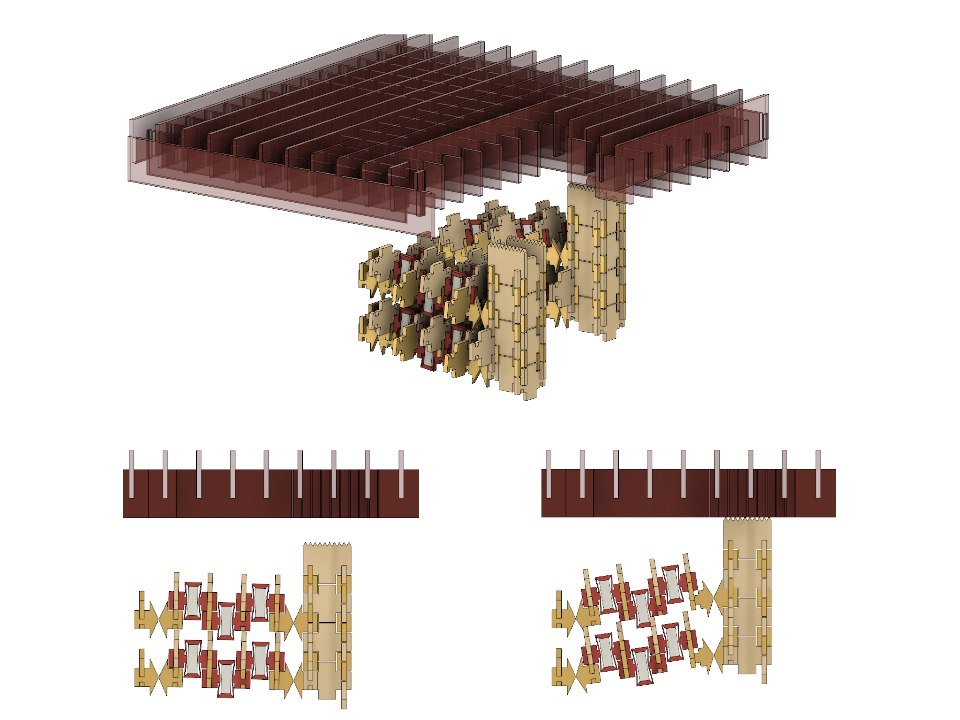
These mechanisms can then be composed to form robots which are themselves capable of assembling the parts they are made out of.
Finally, through the development of robots with fine placement capabilities, we may begin to look at how the functional bricks themselves may be assembled from even more primitive single material building blocks.
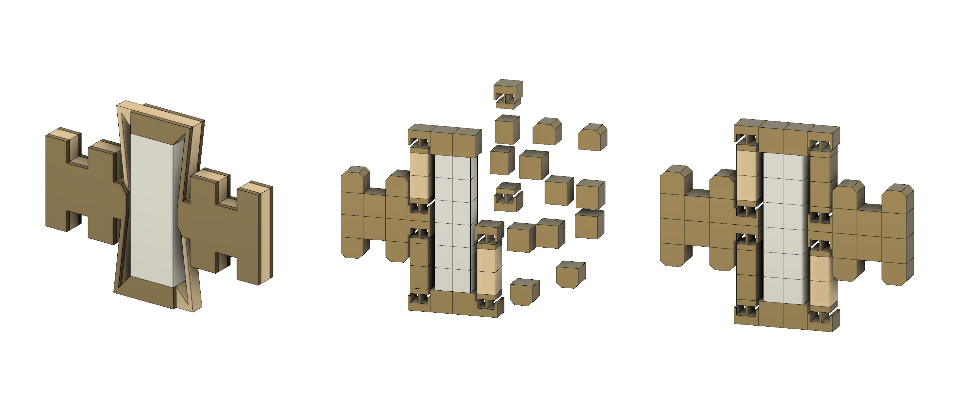
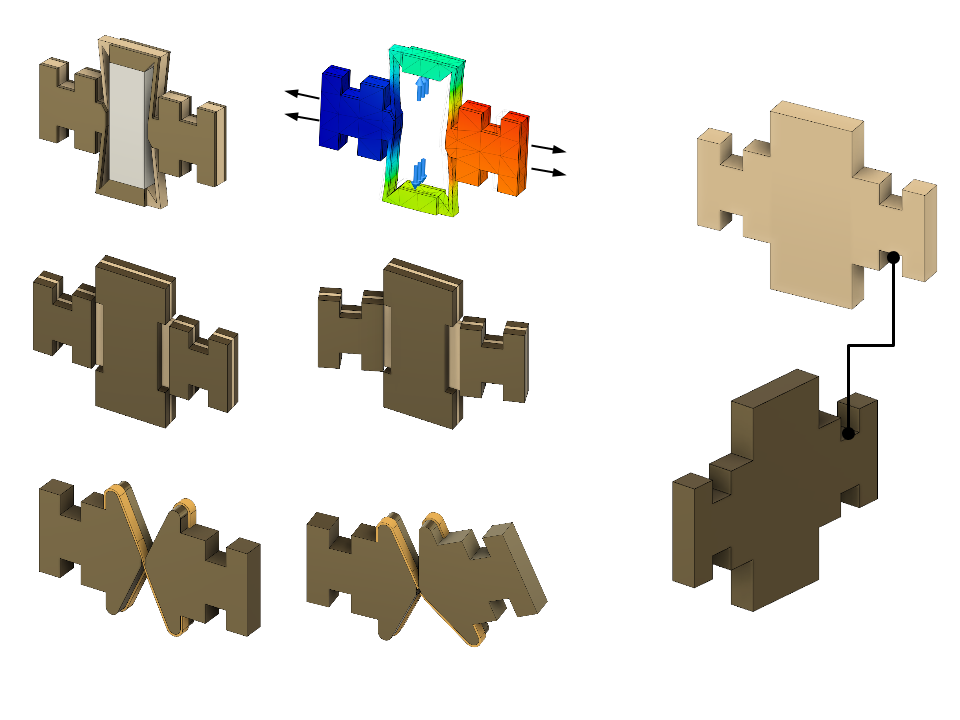
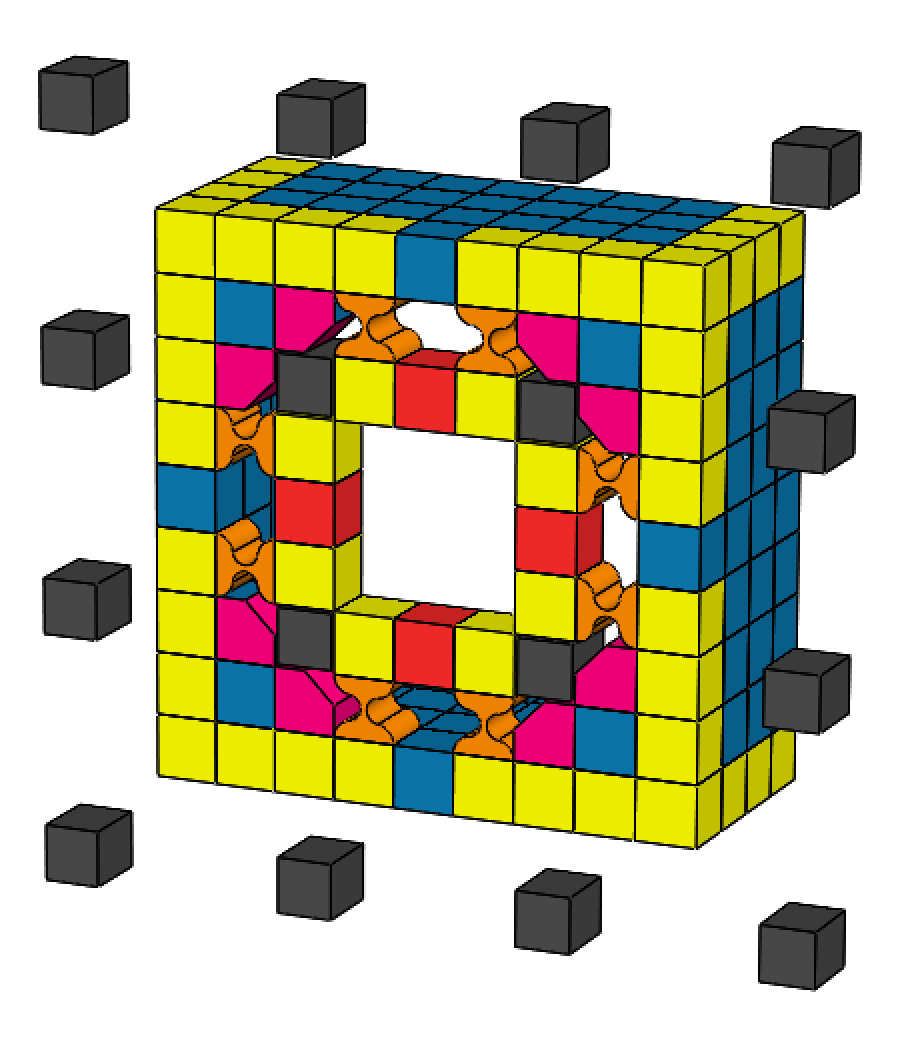
Hexagonal Tiles are embedded with functions including rotary flexure, and linear actuation:
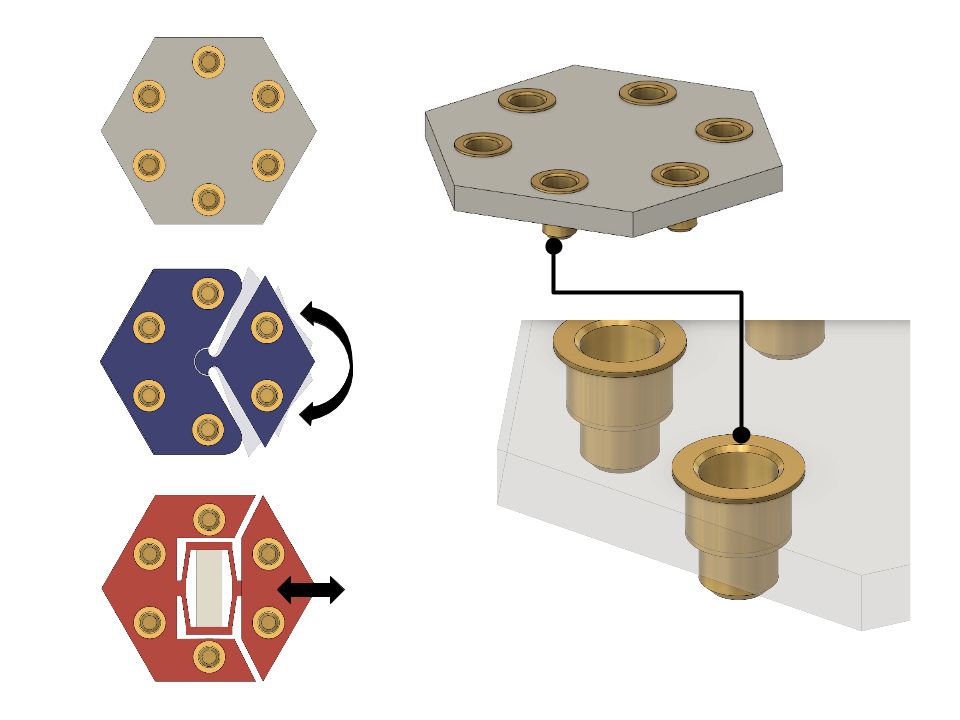
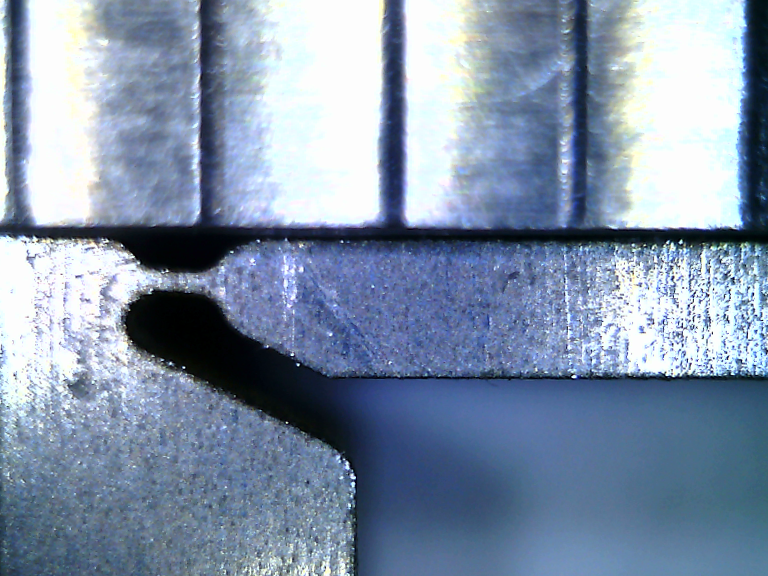
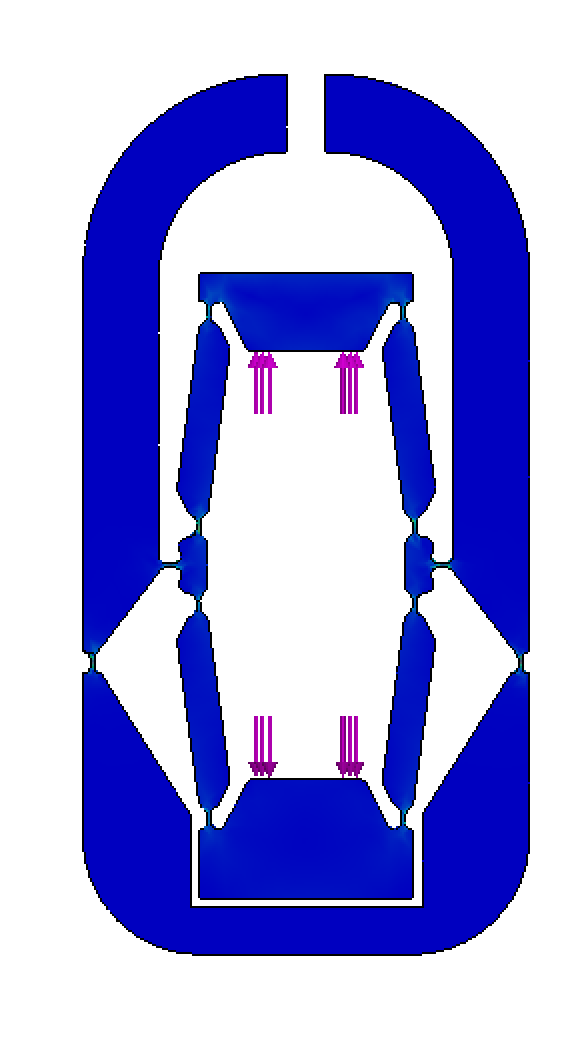
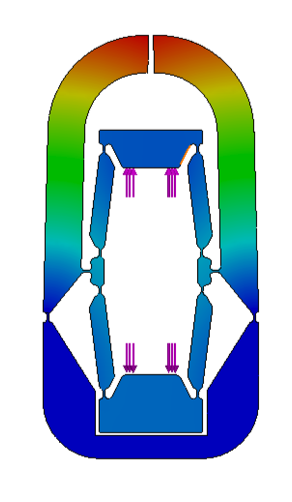
With these three primitives we can assemble a large stroke linear actuator with motion constrained by a linear flexure stage.
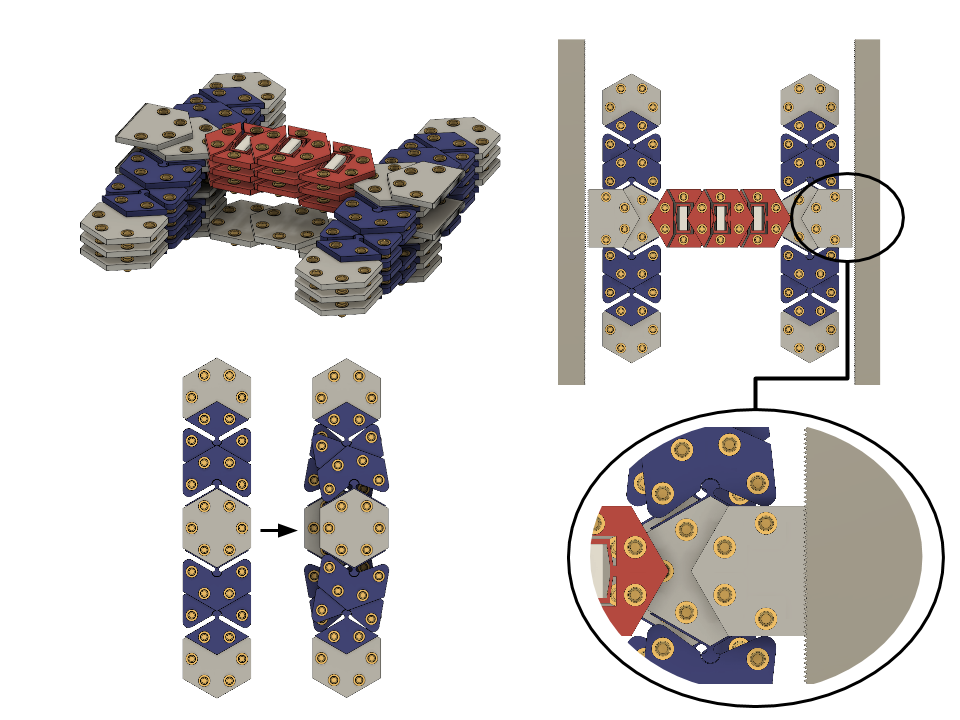
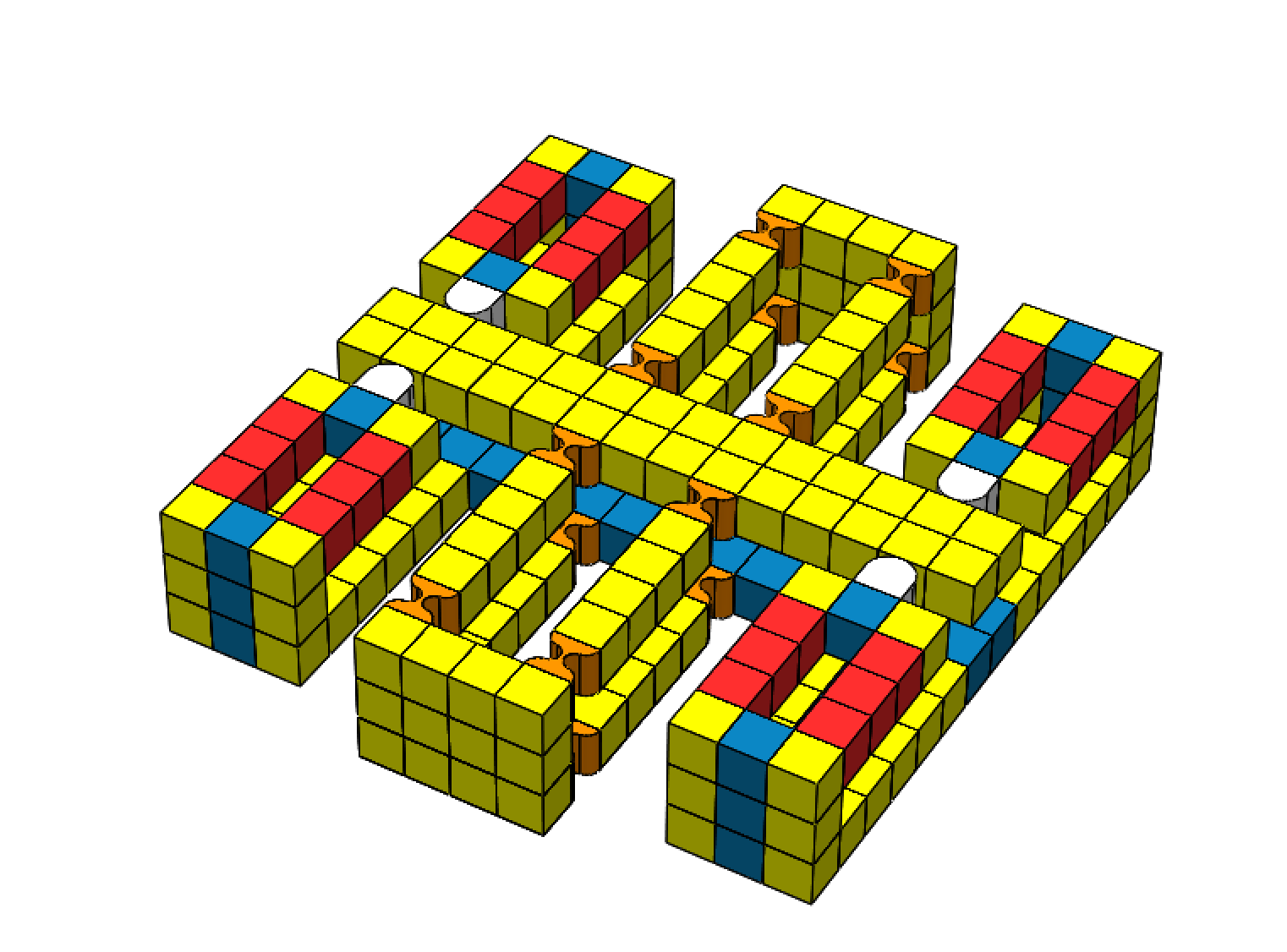
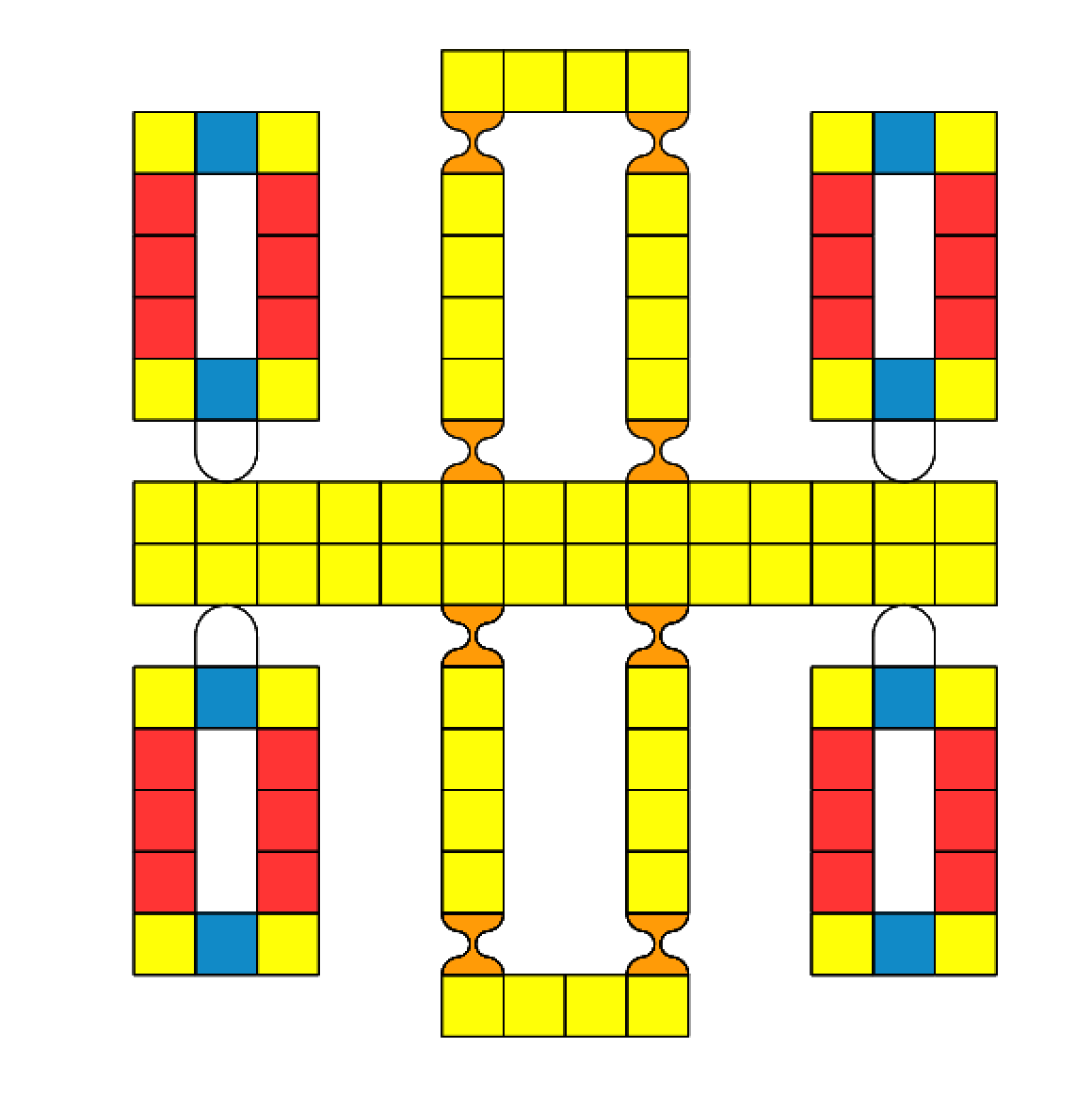
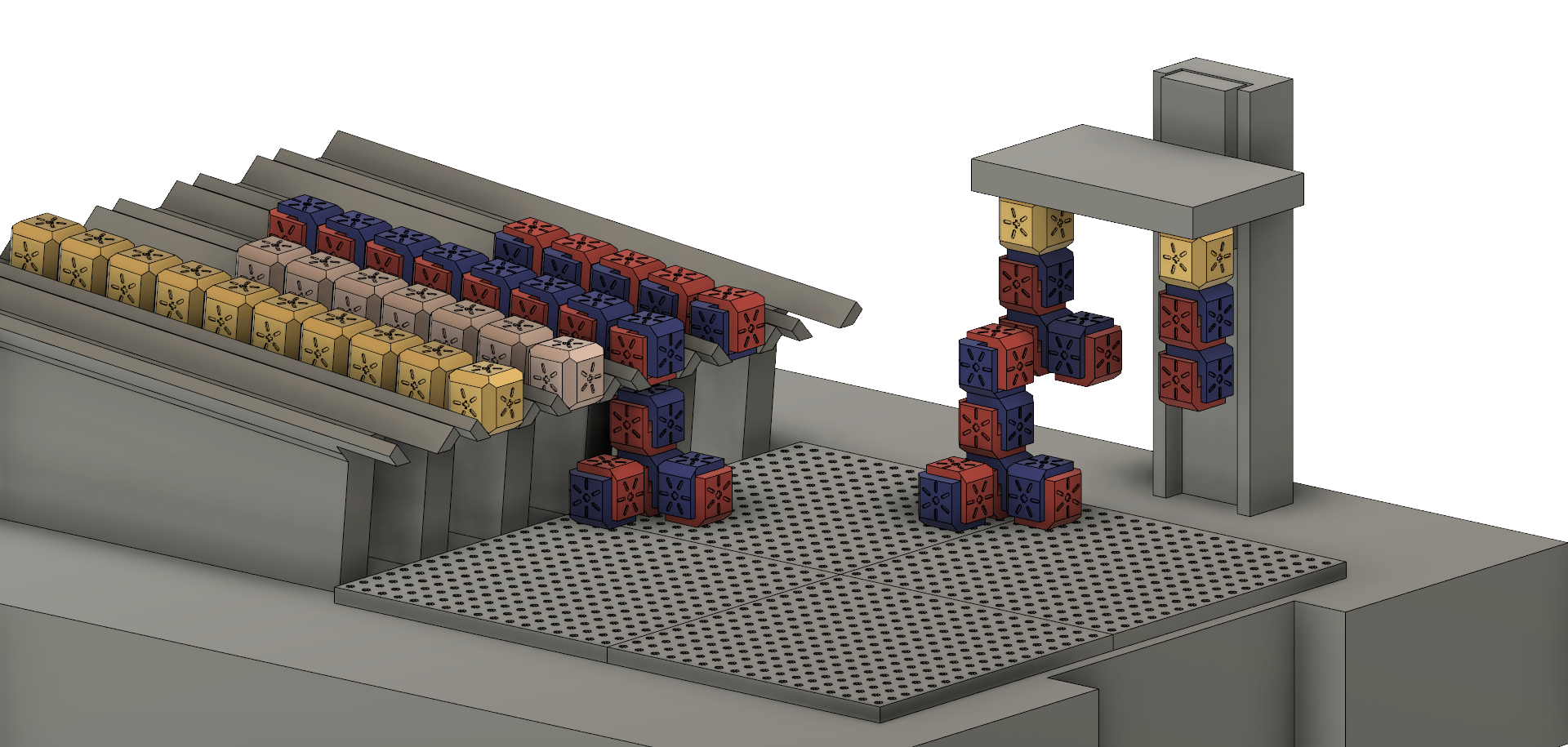
An assembler composed of four linear actuator blocks.
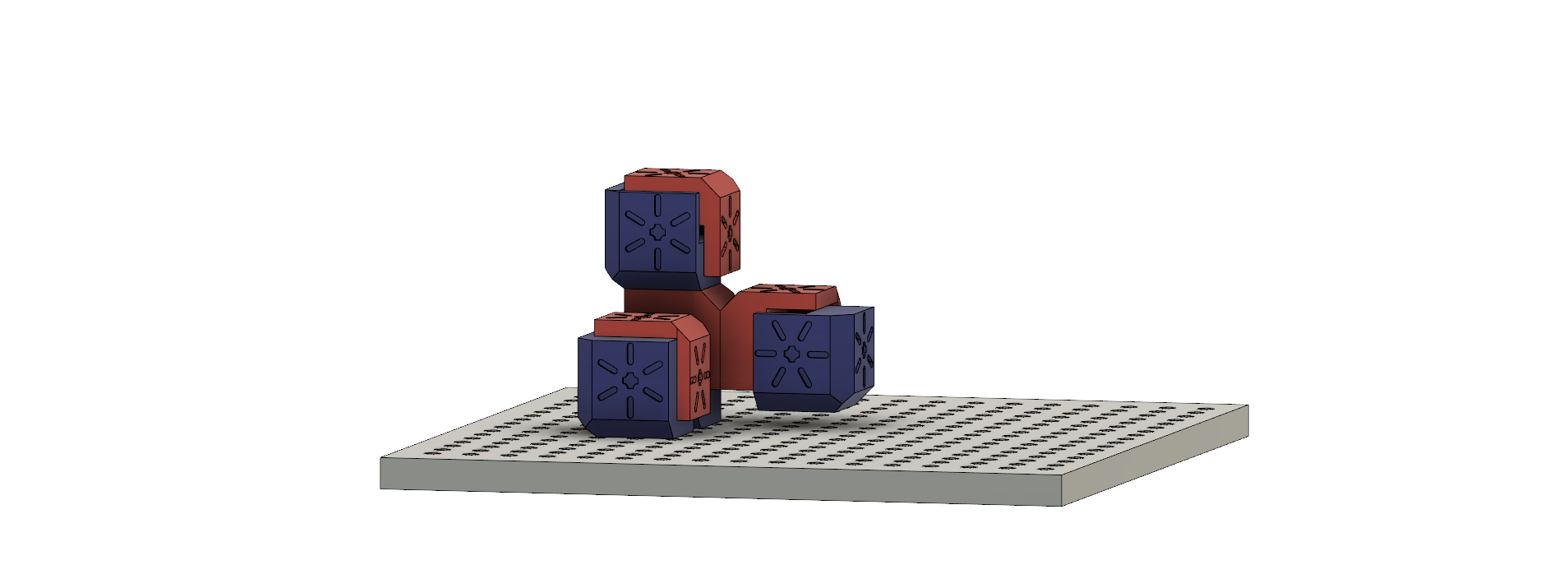
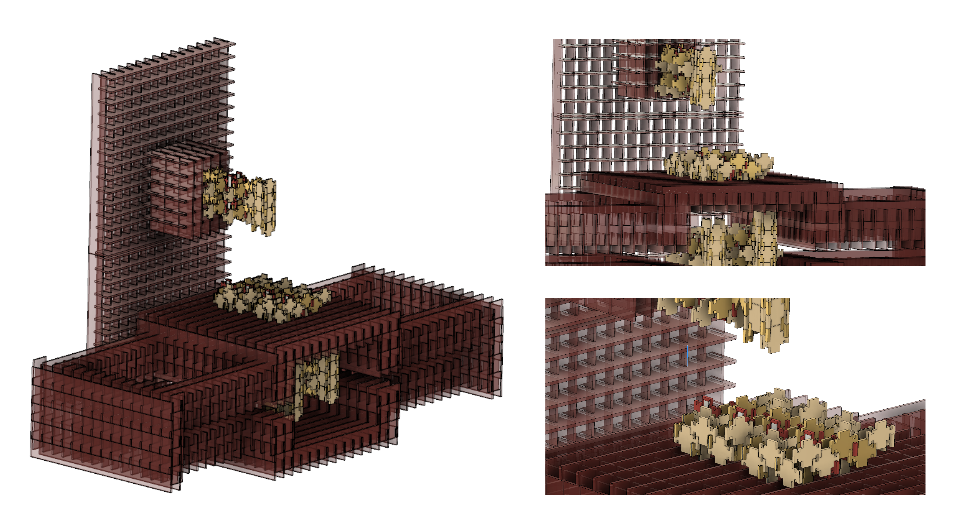
Assemblers are assembling an object from digital material building blocks.
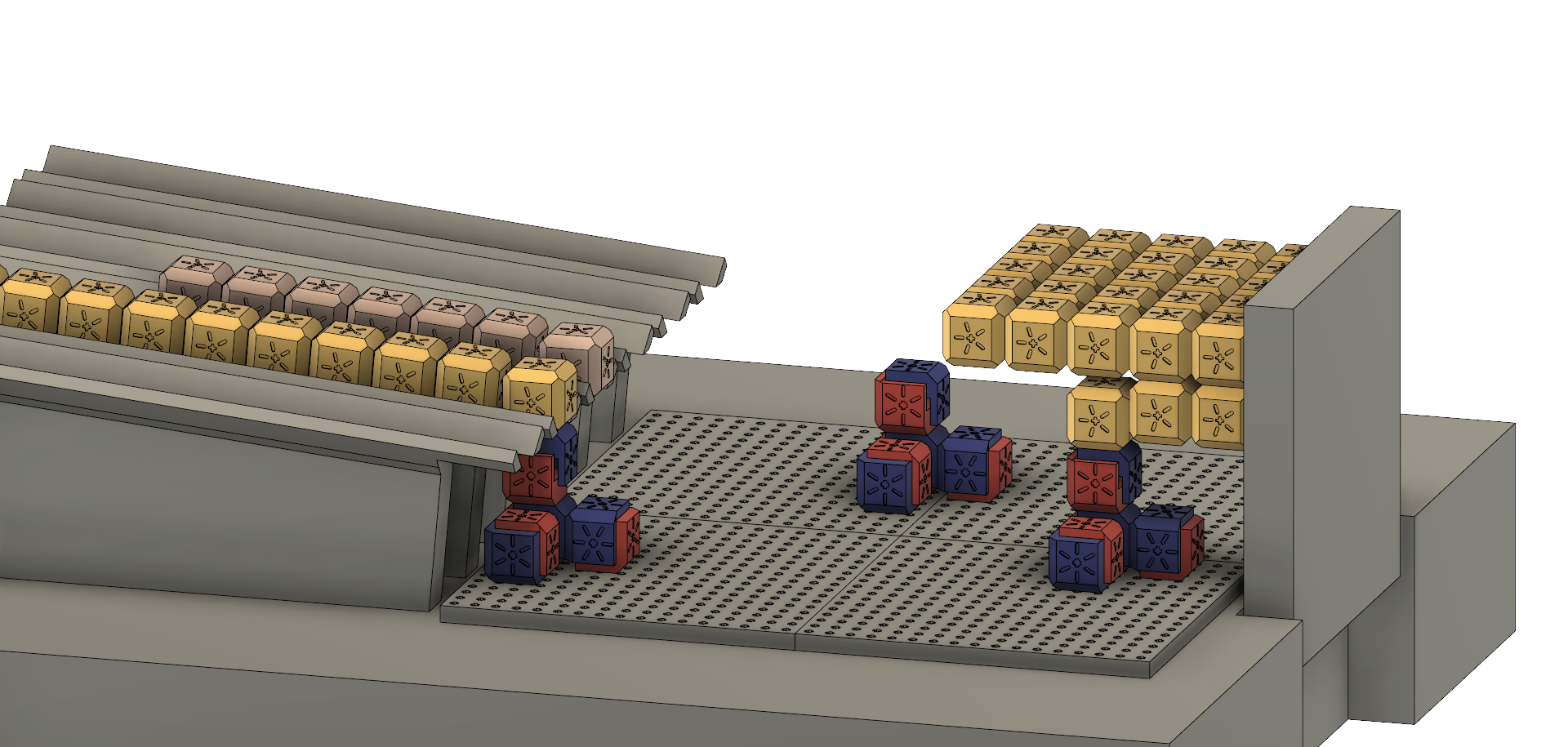
Assemblers can also assemble themselves from a feedstock of linear actuator blocks. An external Z-axis is used to lower the newly assembled assembler to the substrate.
Microgripper
Lattice Anchor
Linear Translator